Question
What was the hard part?
Could SAM specialize without retraining the whole foundation model?
Project dossier / AI/ML Systems
Fine-tuned SAM ViT-H (636M parameters) on 12,000 augmented images, improving mIoU from 47.52% to 66.35%, an 18.83-point gain.
Evidence board
A three-part fine-tuning study showing when foundation-model specialization helps, when it fails, and why the baseline matters.
Question
Could SAM specialize without retraining the whole foundation model?
System
Python / PyTorch / Computer Vision / SAM
Evidence
The 18.83-point mIoU gain showed specialization was worth it for camouflage.
Decision
Memory limits and class imbalance shaped the loss function, prompts, and training plan.
Artifacts linked above
That's what my classmate Anurag and I wanted to find out when we chose our final project for Computer Vision at GWU. SAM (Meta's Segment Anything Model) is remarkable at what it does. Give it any image, click anywhere, it'll segment something. But "good at everything" often means "not great at anything specific." We wanted to know if we could take that foundation model and push it toward tasks where the vanilla model genuinely struggles.
We picked three challenges, each harder than the last. What followed was one failure, one modest success, one breakthrough, and a trip to the Smithsonian Zoo.
We started with wood texture segmentation: teaching SAM to distinguish between different wood grains (oak, walnut, pine) in 2x2 mosaic images. It felt like a reasonable warm-up.
We trained on 500 synthetic mosaics, used Dice loss only, ran 5 epochs. The training loss dropped to 0.0001. We were thrilled.
Then we tested it. On Hard Mode, our "specialized" model scored 59.52% mIoU. The vanilla MobileSAM scored 95.80%.
We made it 36% worse.
Looking back, it was obvious. A training loss of 0.0001 isn't learning, it's memorizing. We'd overfitted catastrophically on 500 samples, used only Dice loss which doesn't penalize noisy boundaries, had no validation set to catch it early, and most critically: we'd tried to improve a model that was already nearly perfect. When your baseline is 95.8%, there's almost no room to go up and a huge amount of room to fall.
That failure taught us more than a success would have. Don't fix what isn't broken. Low loss is a warning, not a reward.
The second challenge had a real industrial motivation: automated quality control in textile manufacturing. A carpet production line generates thousands of meters of fabric daily. Humans visually scan for defects and they miss things, especially after hours of inspection. Could a specialized vision model catch what human eyes miss?
The catch: we had only 89 labeled defect images from the MVTec AD dataset. That's nowhere near enough to train a neural network.
So we built a synthetic defect generator. We took 280 defect-free carpet images and programmatically injected three types of anomalies: darkened patches, thin dark lines, and hue-shifted circles. From those 280 clean images, we generated 500 synthetic training samples.
Applying lessons from the wood failure: no more wild loss drops, no more training without watching the curves. The loss decreased steadily from 0.25 to 0.15 across 5 epochs. Stable, gradual, healthy.
On real defects: 36.18% mIoU, up from the baseline's 29.43%. A 6.75-point improvement on industrial data our model had never seen during training.
Not spectacular. But the direction was right, and we now had a framework that worked.
Design Decision
Evolution is a ruthless optimizer for defeating visual detection. It's one of computer vision's hardest problems for good reason.
Many animals have evolved over millions of years to be visually hard to spot, to predators, prey, and humans. COD10K is a dataset of 10,000 images of these animals in the wild, each with a ground truth mask.
We applied every lesson from the previous two experiments. More data: 6,000 training images, augmented to 12,000 with horizontal flips. Bigger model: we upgraded from MobileSAM (40M parameters) to SAM ViT-H, the largest SAM variant at 636M parameters. Combined loss: 50% BCE + 50% Dice loss. BCE forces pixel-level boundaries; Dice keeps the mask shape coherent. Multi-prompt training randomly alternated between center-point prompts and bounding box prompts, so the model couldn't rely on memorizing a prompt pattern. It had to actually learn where the animal was.
The training curves were everything we wanted: steady, gradual improvement over 7 epochs, loss dropping from 0.142 to 0.106 with no spikes, no collapses.
Results:
That gap is the difference between a model that's barely better than chance on this task and one that's genuinely useful.
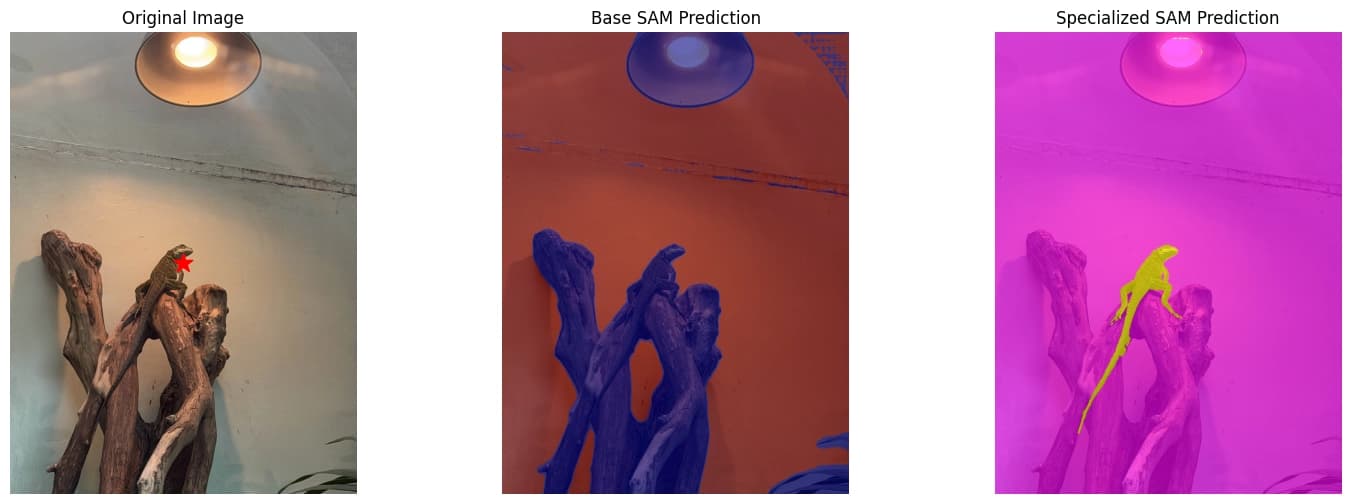
We didn't stop at the benchmark. We took the model to the Smithsonian National Zoo and photographed real animals in their enclosures, completely out-of-distribution from anything in our training set.
It held up. Not perfectly, but meaningfully. Seeing your model correctly segment a camouflaged animal in a real environment you photographed yourself is a different kind of validation than a test set number. It tells you the model learned something real.
Baseline → specialized · mIoU
Wood textures — MobileSAM, Dice loss, 5 epochs
Carpet defects — MobileSAM, 500 synthetic samples
Camouflaged animals — SAM ViT-H, BCE+Dice, COD10K
The single best predictor of whether specialization works isn't the model, the loss function, or the data volume. It's the baseline. How much is the model already struggling? Wood at 95.8% had nowhere to go but down. Camouflage at 47.5% had real room to improve.
Fine-tuning a model that's already excellent on your task is mostly just risk.
You learn more from a well-documented failure than from an undocumented success. The wood experiment failed, but because we understood why, every later experiment got better. The carpet experiment worked a little, but its limits were obvious. By the time we reached camouflage, we weren't guessing as much.
What Worked
What Didn't
Built with


